Overview:
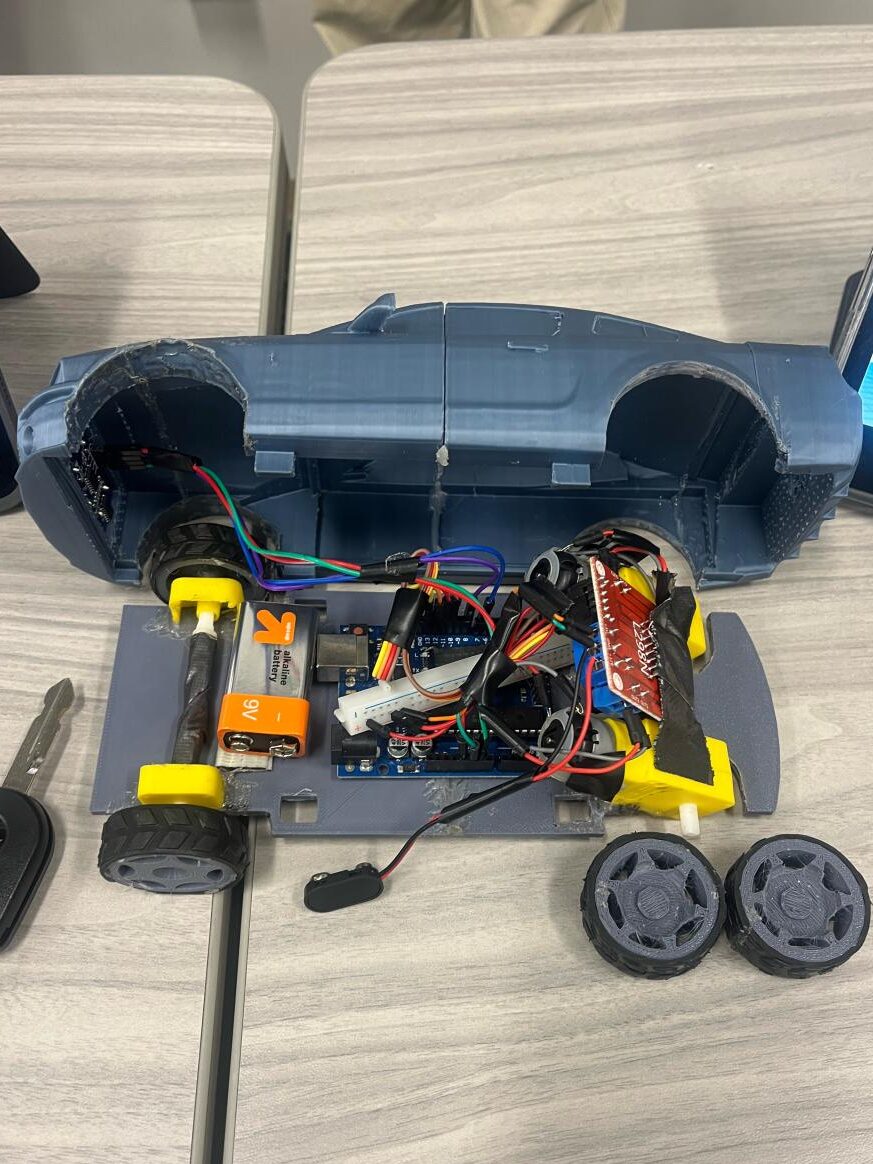
This project involved designing and building an autonomous robot capable of detecting and avoiding obstacles using ultrasonic sensors. Developed as a team project, the robot integrates sensor data processing with real-time motion control to navigate its environment without human input.
The robot was peer-voted as the best-performing robot in our class showcase, recognized for its reliability, clean wiring, and smooth navigation logic.
My Role:
I served as the Test Lead and was responsible for circuit design and system integration. I led the testing phase to validate sensor performance, troubleshoot motor control issues, and ensure stable operation. My work focused on clean, modular wiring and efficient power distribution to maintain consistent performance throughout testing.
Key Features:
- Obstacle Detection: Ultrasonic sensors enable the robot to detect nearby objects and dynamically avoid collisions.
- Autonomous Navigation: The robot automatically adjusts its direction and movement based on real-time sensor input.
- Microcontroller-Based Logic: Arduino Uno processes sensor data and sends commands to the motor driver to make navigation decisions.
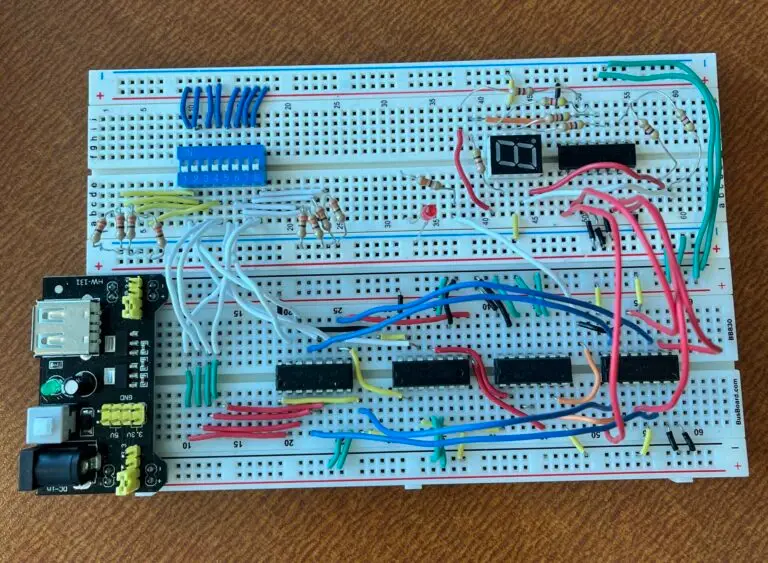
- Custom Circuit Design: A stable and organized circuit was built to support the sensors, motors, and microcontroller, simplifying debugging and enhancements.
Technologies Used:
- Arduino Uno
- Ultrasonic Sensor
- H-Bridge Motor Driver
- Dual DC Motors & Chassis
- 9V Power Supply
- C/C++ (Arduino IDE)
Skills Demonstrated:
- Circuit design and prototyping
- Embedded system testing and debugging
- Team collaboration and leadership
- Sensor integration and automation logic
Project Goals:
Our goal was to create a low-cost, reliable autonomous robot that could navigate and avoid obstacles without human assistance. The project not only improved our understanding of embedded hardware and software, but also demonstrated the value of collaboration and iterative testing.